
If you haven’t checked out the first part of this blog series where I got to grips with designing my own RC car you can check it out [here]
I set my created designs away to print overnight and came back the next morning to 4 motor mounts and 4 wheels. I elected not to print the larger wheels with the intention of going back to do so if the smaller versions did not work out.

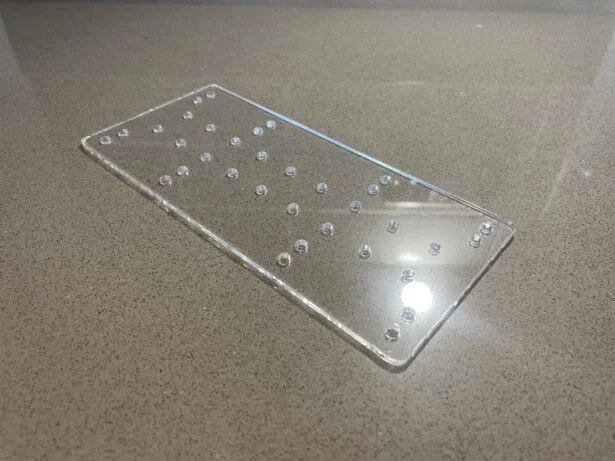
For the chassis plate the making portion was again relatively simple, I own a cheap desktop laser cutter which allows me the ability to quickly make simple 2D profiles. I loaded the DXF I had saved out of SOLIDWORKS into the lasers control software and set the number of passes required. I’m still guessing my way through laser cutting but I’ve got a rough rule of thumb that one pass at 30% power roughly equates to 1mm cutting depth. As the material I was using was 3mm thick I proceeded with 3 passes. I loaded the material onto the bed, aligned the start position of the laser and clicked start. Within 5 minutes I had the chassis plate cut and peeled off the protective film to reveal a clean-cut look.
So, with my electronic components sourced, my 3D printed parts complete and supports removed and my laser cut chassis cut it was time to start putting it all together! The next major step to allow the design to come together was to use a soldering iron to insert a load of heat set thread inserts into the 3D printed motor mounts… 8 per mount 32 in total. If you’ve never used heat set inserts before I suggest you check them out, they’ve become an everyday tool I use in my projects due to the ease of use and ability to quickly add accurate machined metal threads into 3D printing. I used them a lot during one of my previous blog posts where I showed you how you can use SOLIDWORKS for Makers to make you own branded wall sign, check that blog out [here]
The process of inserting the heat set inserts is simple, design your model to have a hole equal to the small diameter of the insert, in my case 4mm. Insert the small diameter into the 3D printed hole, place the tip of a heated soldering iron onto this, let it heat up and push down till it sinks into place. Doing this 32 times begins to feel a tad repetitive however these inserts are by far the best way to achieve a decent thread in 3D printed components.

Once I had all the inserts set into position I bolted the 4 servo motors into position on the mounts. To do this I used some M3 cap head screws to secure these against the created frames before then securing these to the chassis plate.

Once the 4 motors were secure to the chassis, I needed to then install the hubs to the servo output shaft. I pushed the hubs over the cogs and secured using the provided screw, if you’re following along exercise caution when tightening these screws into position. It’s very easy to strip out the plastic center hole on the servo motor and if possible, I’d advise you to look for an all-metal geared servo to avoid this potential issue. To install the wheels was again a simple process, I used 4 screws to secure through the holes we created in the design and screwed these into the hub behind. Again, these are plastic hubs so there’s a possibility of stripping the hole out if you’re too enthusiastic when securing.

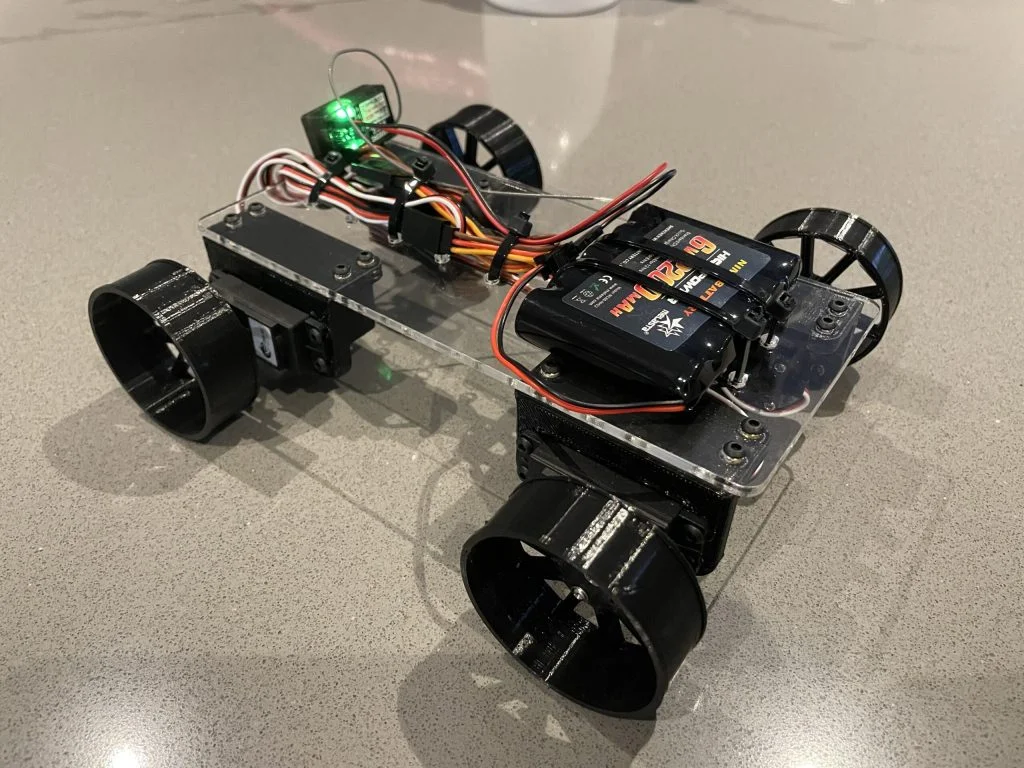
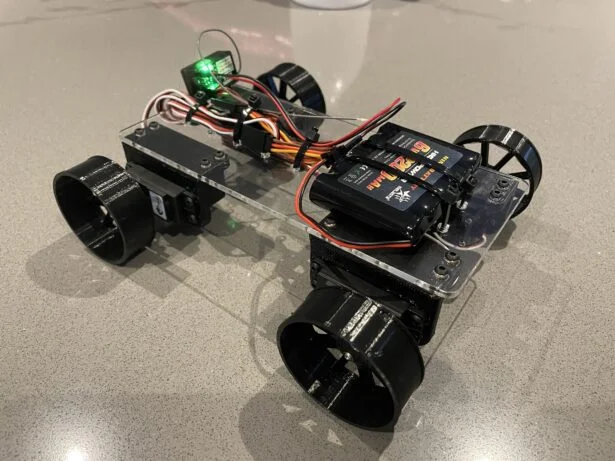
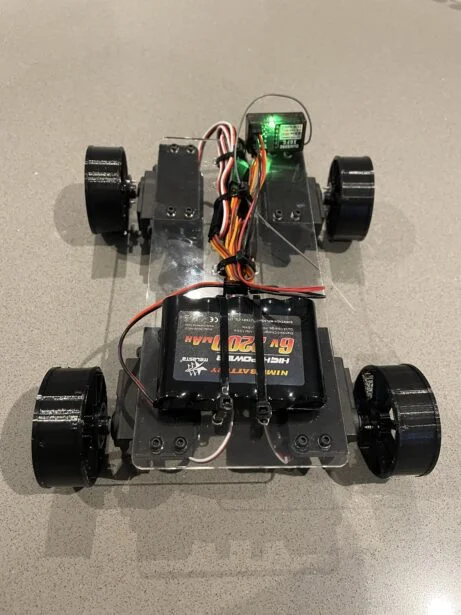
From this point it was a case of wiring the servos into pairs using the purchased Y cables, these are essentially like an old school headphone splitter which sends the signal from the controller to two servos rather than one. Both the servos on the left side connect to one output from the receiver and the same for the right pair. The battery pack also connects into the receiver unit, as the battery pack I had ordered had a different type of connection to that on the receiver I used some connector cables I had in my workshop with a male to female connector to make the connections. The male pins I pushed into the battery output connector and the female over the male pins on the receiver unit. That was it for the building portion really, I added the elastic bands between the pairs of wheels to create the tank track effect along with securing the battery to the base with some cable ties using the grid of holes I’d designed into the chassis plate earlier.
The final step of the build was top connect the receiver to the transmitter, I turned the transmitter on first before plugging in the receiver to the battery. From here there’s a procedure to follow to connect these together which involved holding the trigger pressed in whilst following some other commands. The light flashed to let me know connection was successful. To achieve the skid steer method of control I needed to ensure the remote was in “Mixed Mode” which essentially allows for control using 4-wheel steer rather than rack and pinion style. The remote automatically calculates how fast to turn each sides wheels to turn or drive based on your inputs.
I hope you enjoyed following along with this build, watch the video below to see how I put the contents of this blog into practice!