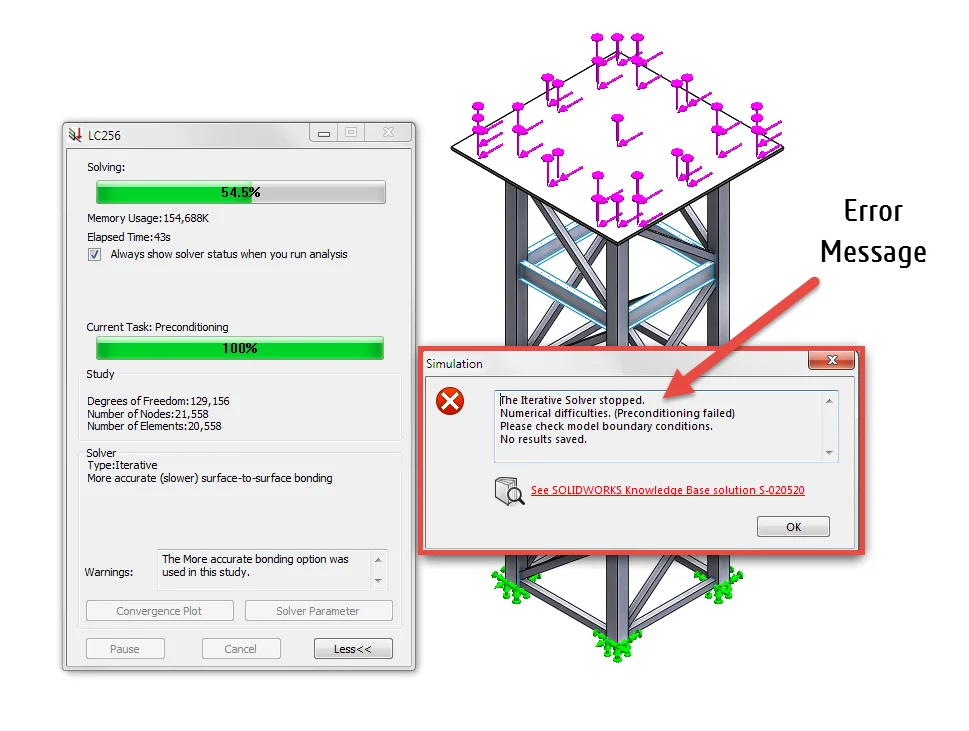

You have probably had a situation in the past where the SOLIDWORKS Simulation solver has given an error message as shown below, about a model having insufficiently restrained degrees of freedom or having to check the model boundary conditions.
Often times, this is due to one or more solid body geometries being able to freely translate in the X, Y, Z directions or freely rotate about the X, Y, Z axes. In a simple setup, this could be easy to find. However, in most cases, the geometry could be complex and troubleshooting this could lead to wasted time and lost productivity!
SOLIDWORKS Simulation has a built in tool called “Find Unconstrained Bodies” found in the feature tree under Contacts, Find Unconstrained Bodies. See image below.
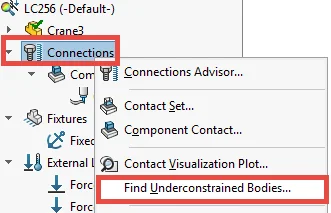
This simple yet powerful tool can help diagnose problems with simulation setup ensuring you have sufficiently applied boundary conditions to prevent any rigid body motions on the overall geometry.
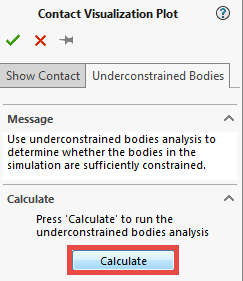
In the property manager dialog box, simply click on the “Calculate” button as shown below. This performs a simplified analysis (called as degree of freedom analysis or D.O.F) to identify which bodies are not fully restrained and provides feedback on the specific degrees of freedom.
An example of a weldment structure is used to illustrate how this works. The video below shows how the tool provides visual feedback on each body along with the specific freedoms. Selecting any of the unconstrained degree of freedom animates the body on screen providing clear feedback on not only what the problem is, but where it is occurring.

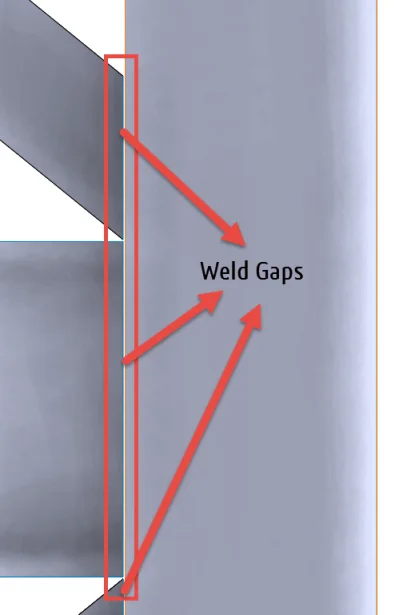
As you can see, there are a lot of bodies in this model that are completely free to move! The reason for that is there are weld gaps between parts to account for tolerances as shown below. Simulation does not understand this functional intent and so this needs to be conveyed using the appropriate boundary conditions!
Another great tool that works similarly and is part of the same dialog box, is called the “Show Contact”. The primary difference between the two options is that “Find Unconstrained Bodies” is helpful to troubleshoot issues with fixtures / boundary conditions. The “Show Contact” is helpful to troubleshoot issues with contact definitions.
Often times, contact conditions are used to describe the physical interactions between parts of an assembly or between bodies of a multi body part. While Simulation provides an easy to use and intuitive option to define contact conditions, it is easy to miss one of these in a larger or complex model where several components might come into contact during deformation. And if the contacts are the only means to prevent bodies from any rigid body motions, these would show up in the solver aborting abruptly during the solve.
In the video below, a brake caliper example is used to illustrate how the Show Contact tool can help troubleshoot issues with contact definitions.
Now behind the scenes, the solver uses constraint equations to connect the specified geometry in the contact definition. This is visually mapped and shown as well if you select the check box “Include solver generated contacts”. Note that you will have to mesh the model first before you can check this option. Or else its grayed out!The contact detection above is based upon geometry used in the contact definitions. And is great for ensuring all contact definitions are in place for simulation.
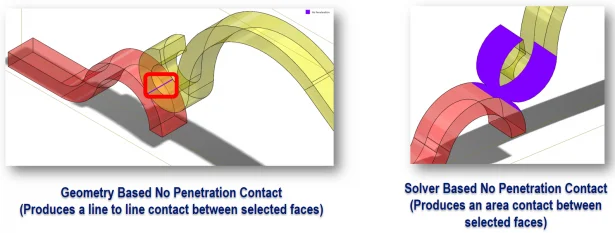
The question you may have us Why is this important? By being able to visualize the contact area used by the solver, immediate feedback is provided on the coarseness of the mesh in the contact areas. It is an ideal indicator of whether mesh refinement is needed in contact areas or not to get better resolution of the contact area by the solver and hence accurate results! An example if shown below to illustrate the differences between the geometry based and solver based contacts
Stay tuned for more upcoming discussions on tips and tricks and productivity tools in SOLIDWORKS Simulation. To learn more about SOLIDWORKS Simulation, visit us at https://www.solidworks.com/category/simulation-solutions