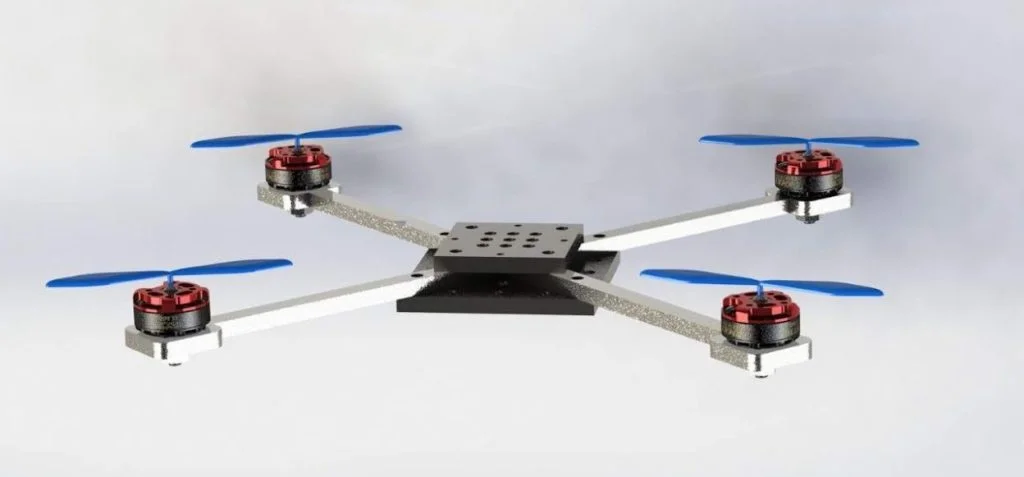


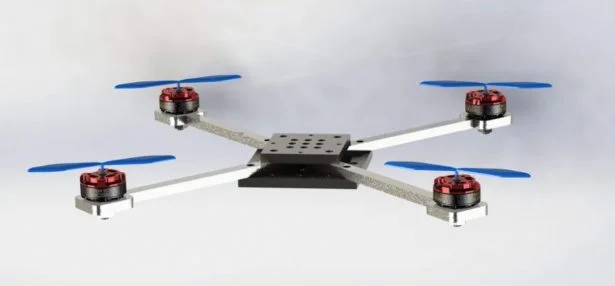
Two teammates and I designed and built this quadcopter “Kiwi the Drone” via Boston University’s Unmanned Aerial Vehicles club.
Design
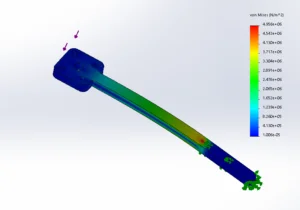
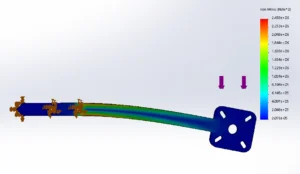
We used SOLIDWORKS to create multiple frame designs and construct their assemblies. The ultimate goal was to minimize weight while maximizing strength. We used SOLIDWORKS Stress Analysis with multiple use cases to weigh these factors. Here are a couple photos from the simulation:
Build
Once we had finalized our frame design, it was time to make the pieces! We used a CNC router to create the arms and body plates from a sheet of polycarbonate.
Assembly
We attached the motors and the flight controller directly to the frame. We trimmed the motor wires and soldered plugs to them, to make the wires fit more easily, and wired the electronic speed controllers (ESCs) to the controller and motors. We then used the Cleanflight flight controller software to get kiwi ready to take off.
Fly!
Check out this quick video of Kiwi the Drone’s first flight.
