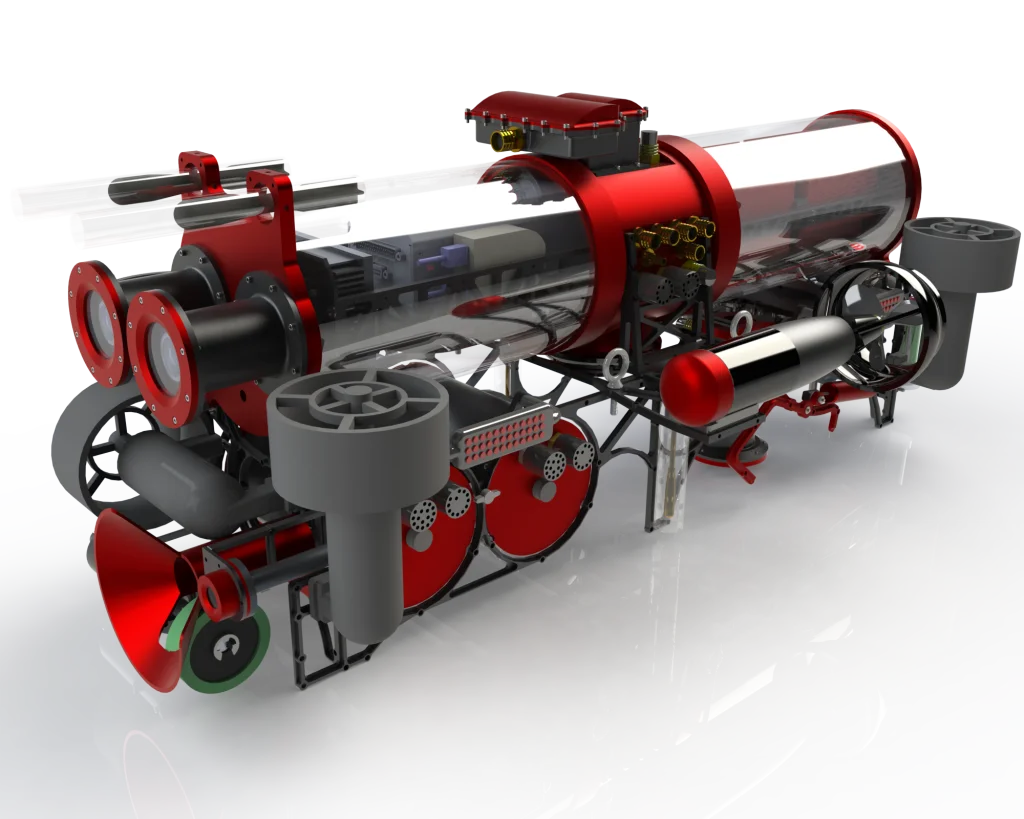

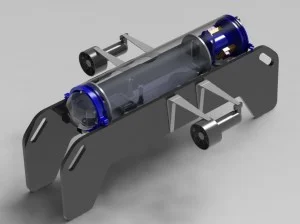
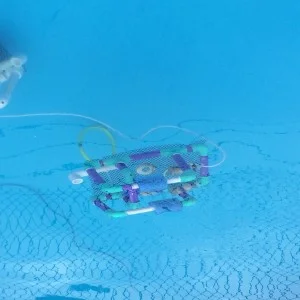
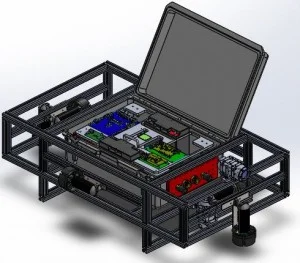
Robots got wet. Engineering teams were challenged. At RoboSub 2014 students design and build autonomous underwater vehicles (AUVs) capable of performing realist missions in the underwater environment. 1st place winner Cornell AUV team provided us with a SolidWorks model of their winning design.
There were 36 university teams from 11 countries and two high school teams that participated.

Sponsored by the AUVSI Foundation and Office of Naval Research, the 17th annual RoboSub international competition was held at the SSC Pacific TRANSDEC, San Diego, CA, USA.

The Mission was clearly defined. An AUV must demonstrate the ability to stop, interact with traffic lights, complete a parking task, avoid speed traps,and toss coins into a toll booth.

The AUV manipulates pegs on a board and finds a pinger, grabs a “moon rock” and moves the rock to a release position. The AVBotz team from Amador Valley High School was up for the task.

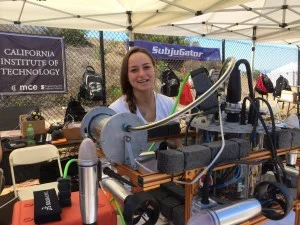
ETS had a great poster to explain their system.
There was even a demonstration by Sea Perch for younger engineers.

Studets also face a grueling design presentation to a panel of distinguished judges from the Office of Navel Research, Autonomous Undersea Systems, SPAWAR SSC Pacific, NATO Undersea Research Center, Department of the Navy, Penn State and Virginia Institute of Technology.





Thank you teams for sharing your SolidWorks designs and the RoboSub experience with the SolidWorks Community. Marie