
Note: this blog was written by Victor Denisenko, Chief Designer in the Research Laboratory of Design Automation, ltd (RLDA, Ltd.) Ph.D.
Three years ago we started to bring to life our idea of developing an inexpensive telepresence robot called the BotEyes Telepresence robot. Robots of this type are needed to enable people to be where they can’t be in person. These types of robots are commonly used for remote work, remote teaching, learning, and remote healing.
Remote operation using telepresence is the main application of this type of robots. Two scenarios are most demanded by the market. First is when an employee working at home or on a business trip is able to participate in the life of the company and works exactly as if he/she is in the office. The second one is when the head of the company, which has several offices, performs management functions by communicating with the staff or other managers remotely, with the help of a robot.

The BotEyes telepresence robot uses a tablet in the robot head for video communication, and its wheels are controlled by the Internet from any devices such as smartphones, tablets, or computers. It means that any person in any place in the world can communicate with any other people like with Skype, but at the same time the “tablet on the stick” can drive on the wheels and you can control driving direction and speed even if you placed in a distance of 10,000 miles away from the robot. The use of these robots is significant during the COVID-19 pandemic because a person can do his or her work remotely.
How SOLIDWORKS Helped Bring BotEyes to Market
To create the BotEyes, we bought SOLIDWORKS and started to develop its design and construct the body, wheels and head. Below you can see the robot head model and its manufactured exemplar.
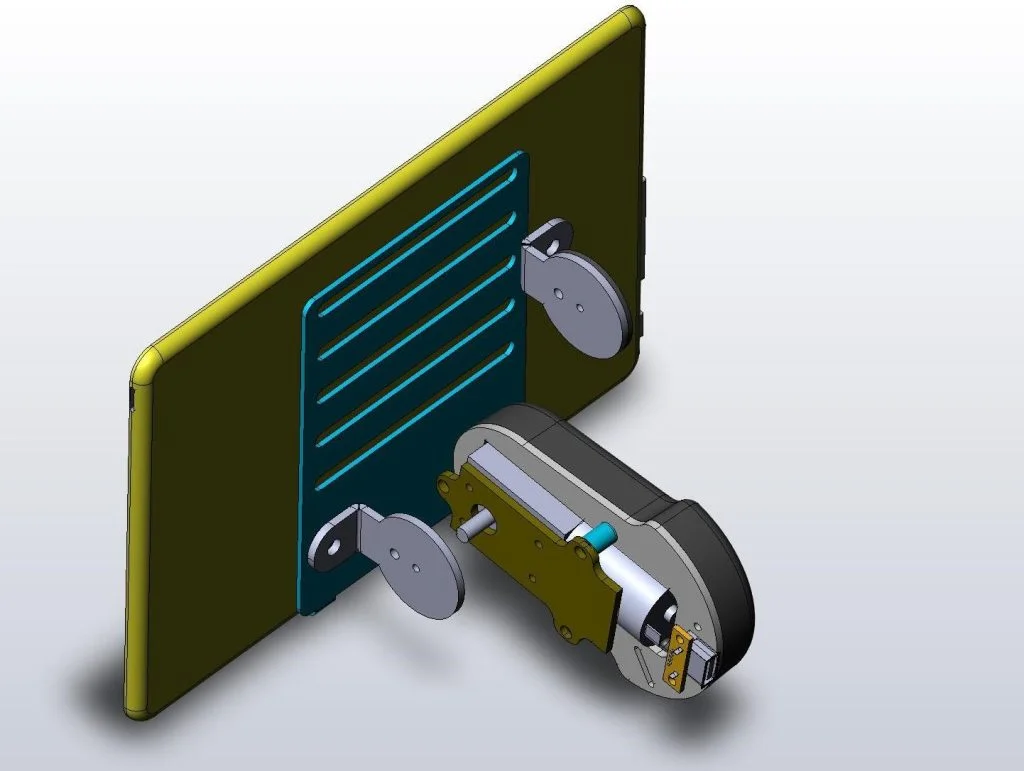
This model contains some metal parts that were manufactured using a laser cutter. To do that we made an export for each of the SOLIDWORKS model parts to DXF format using “Save Us” menu item. Our laser cutter works directly with DXF file format, so we get a solid metal part directly after its design. We used the same method to make all other robot parts made from sheet metal. Below you can see the robot head manufactured from the SOLIDWORKS model.

Once the design had been developed, the company used its CNC machine to make molding forms and get the plastic body parts. The plastic parts for robot we manufactured using a vacuum forming machine. This equipment needs molding form. First, we designed the 3D robot body model.
The molding form must correspond to the inner part of this model. To obtain it, we took the solid parallelepiped and inserted into it the robot body model (below).
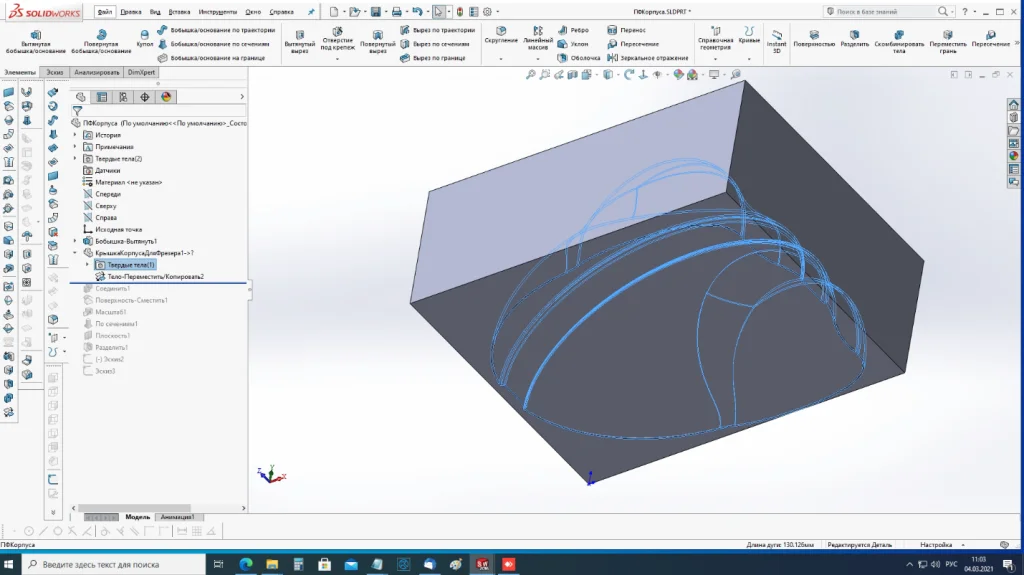
After “combine” operation we got the inner part of the robot body, which we can use as a molding form. You can see it below.
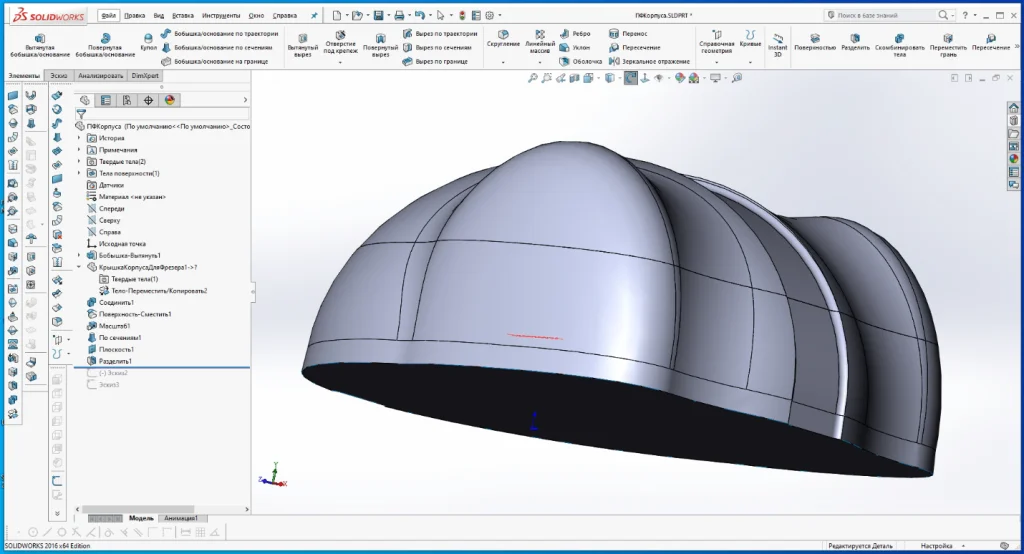
After that, we extended the bottom part of the molding form using the surface offset command, because we needed extra plastic to cut it in future. The picture above shows the full-sized model for molding form manufacturing.
This molding form we made on the CNC machine. Our machine has its own converter from IGES format to G-code, so we easily get a real solid form from SOLIDWORKS model. Below you can see what the manufactured robot body looks like.

The third very cumbersome step that we can successfully fulfilled using SOLIDWORKS is the robot parts arrangement, see below.
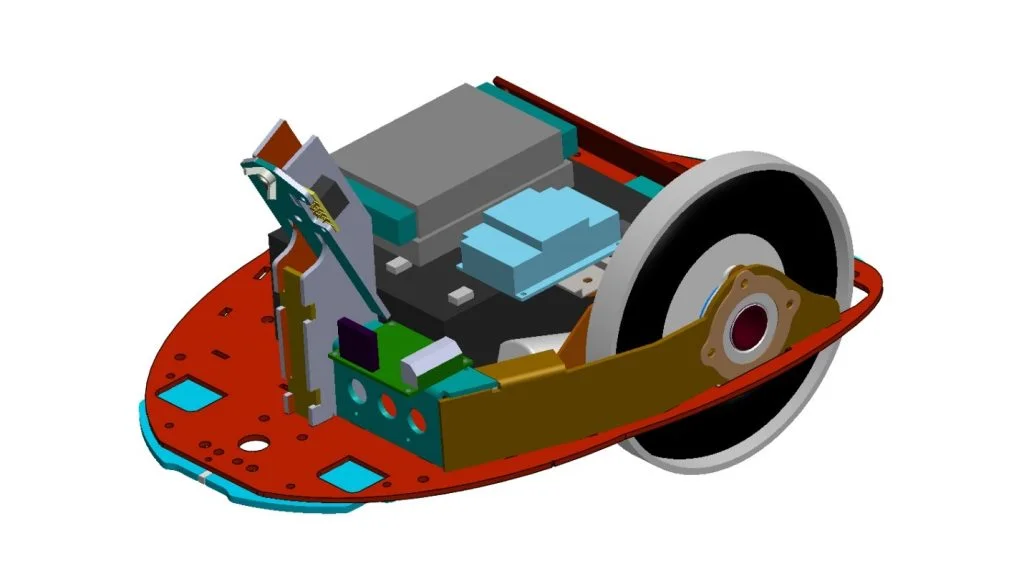
It was done using the Assembly option in SOLIDWORKS. This allowed us to find the best place for each of robot parts and after it was manufactured, we were able to create the assembly without any errors.
Thanks to SOLIDWORKS we developed the telepresence robot, see details in https://boteyes.com, that cost only $1,400 and can do any things that could be done by much more expensive robots in the market today.