

The DARPA Robotics Challenge (DRC) is a three-year robotics systems competition focused on developing robots that can help humans respond to natural and man-made disasters. The Defense Advanced Research Projects Agency (DARPA) is a US federal agency that laid the groundwork for innovative technology such as the Internet, stealth technology, handheld GPS, and more.

The DRC finals, held last month in Pamona, California, consisted of twenty-four teams from around the world testing their robots on simulated disaster courses during hour-long runs for a chance to win $3.5 million in prizes. Taking the top prize was Team KAIST from Daejeon, South Korea.
With help from my SOLIDWORKS colleague Hye-Young Hwang, I got to learn a lot more about these talented young engineers during a recent interview.

Marie: Describe Team KAIST.
Team KAIST: Rainbow Co. and KAIST worked together to develop both the hardware and software. 4 masters, 10 Ph D students in KAIST, 4 PhD in Rainbow Co. all have been working on DRC from the start. Ten staff members from Rainbow Co. assist in the robot’s hardware part. We have been interested in academic issues such as bipedal walking algorithm, articulated robot manipulation, unmanned vehicle driving and etc. The KAIST students consists of 2 laboratories, 13 students of Mechanical Engineering HuboLab, and 5 students of Electrical Engineering RCV Lab.

The HuboLab, supervised by Prof. JunHo Oh, has played leading role in development of HUBO’s all performance such as bipedal walking, manipulation, control algorithm and etc. From the beginning of HUBO history, they have been involved in developing and improving all hardware and software of HUBO series. Rainbow Co. team members, who are the specialists for the HUBO development, are from the HuboLab. RCV Lab is doing about computer vision such as 3D reconstruction, object recognition for the DRC.
Marie: What does “DRC-HUBO” stand for?
Team KAIST “DRC” stands for ‘DARPA Robotics Challenge’, and “Hubo” is word from ‘Humanoid + Robot’. Our laboratory have researched humanoid robot since 2002. We made number of ‘Hubo’ series robots. Hubo, Albert-Hubo, Hubo2, DRC-Hubo, DRC-Hubo+. From DRC-Hubo, we used SOLIDWORKS.

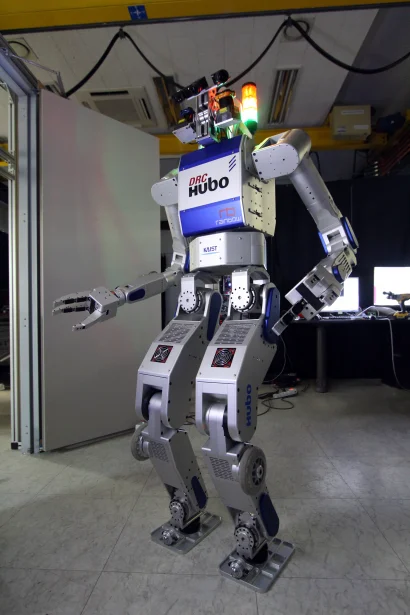
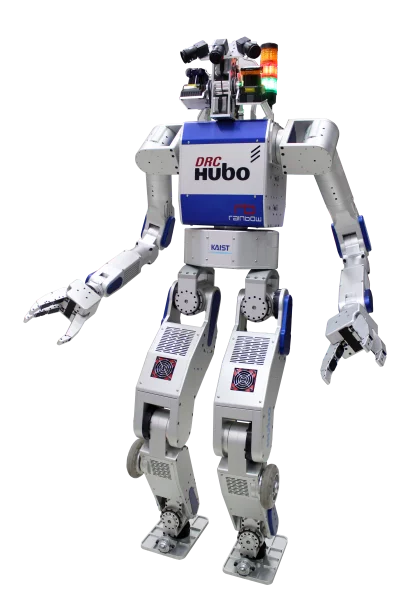
Marie: Team KAIST shared the history of their robots. Describe “DRC-HUBO” – What type of robot is it?
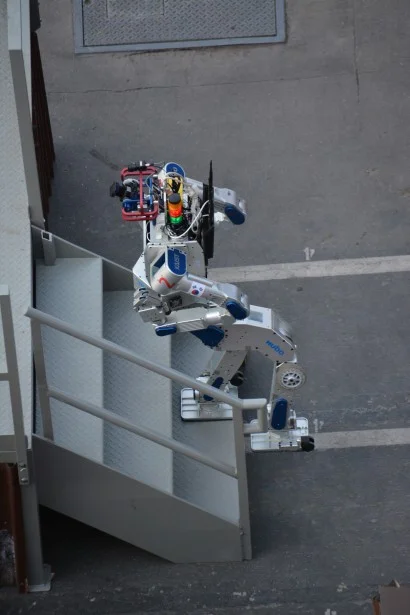
Team KAIST: DRC-Hubo is basically biped-humanoid robot. It can walk on the ground and climb the stairs. DRC-Hubo perform some task with his two arms.
Marie: Why did you enter the DARPA Robot competition?
Team KAIST: We participated in the DARPA Robotics Challenge to show and verify what we accomplished during last 10 years.
Marie: What were the biggest challenges for the DRC-HUBO?
Team KAIST: To all humanoid robots, biped-locomotion is the biggest issue. If the robot falls down, it can cause huge damage on robot. So we had hard time to make a more robust locomotion algorithm. Also, we spent most of our time to stabilize the entire system.
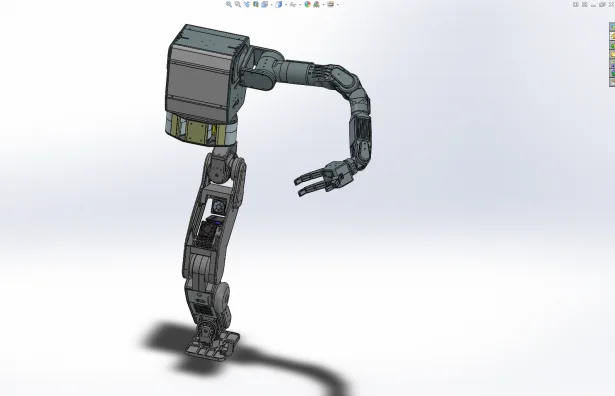
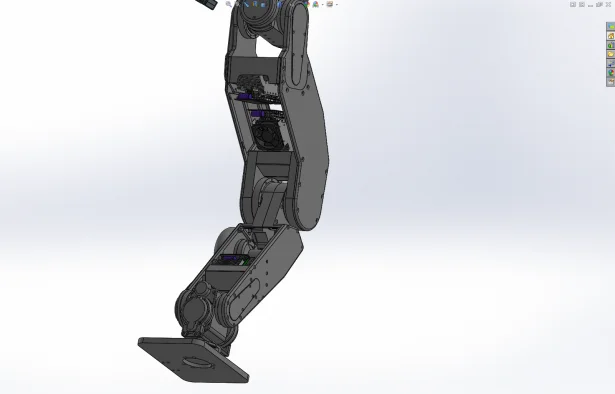
Marie: How did SOLIDWORKS help you with these challenges?
Team KAIST: We used SOLIDWORKS to design our robot(DRC-Hubo), robot-hand, sensor structure and etc. Also, we are using SOLIDWORKS in various field of our research/designing.
Marie: Do you learn SOLIDWORKS in school?
Team KAIST: There is ‘SOLIDWORKS tutorial course’ in our school. But we didn’t take that course. We learned this program by tutorials which is embedded in program.
Marie: Did you use SOLIDWORKS Simulation, Flow Simulation Motion, SOLIDWORKS Electrical or any other SOLIDWORKS software application?
Team KAIST: Most of our design is done by using original SOLIDWORKS. In case of Force/Torque sensor design, we used SOLIDWORKS Simulation to analyze internal stress of structure.
Marie: If you wanted to tell the world something special about your robot, what would you say?
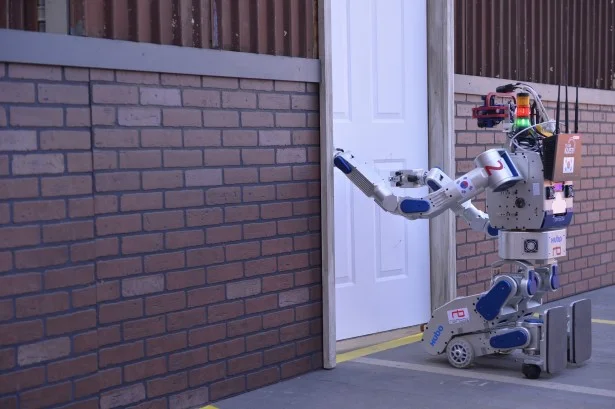
Team KAIST: DRC-Hubo is a biped-humanoid robot. It can walk. It can climb up the stair. It can walk cross the uneven ground. But also it has wheel. It can change, transforming his posture from walking mode to wheel mode. So, the user can choose the type he/she wants.
Thank you Team KAIST for sharing with the SOLIDWORKS Community. Thank you Hye-Young and the SOLIDWORKS Korea team. Marie