
To check out the collaboration features of the 3DEXPERIENCE® platform, Nathan, Wallace, and I, three interns at Dassault Systèmes SOLIDWORKS®, devised and created a robotic arm that could play four different sports.
We used Project Planner to create an overall plan and assigned precise tasks for each of us. My main task was to sketch how we wanted this robot to look, while Nathan calculated the constraints the robot would need to actually function.
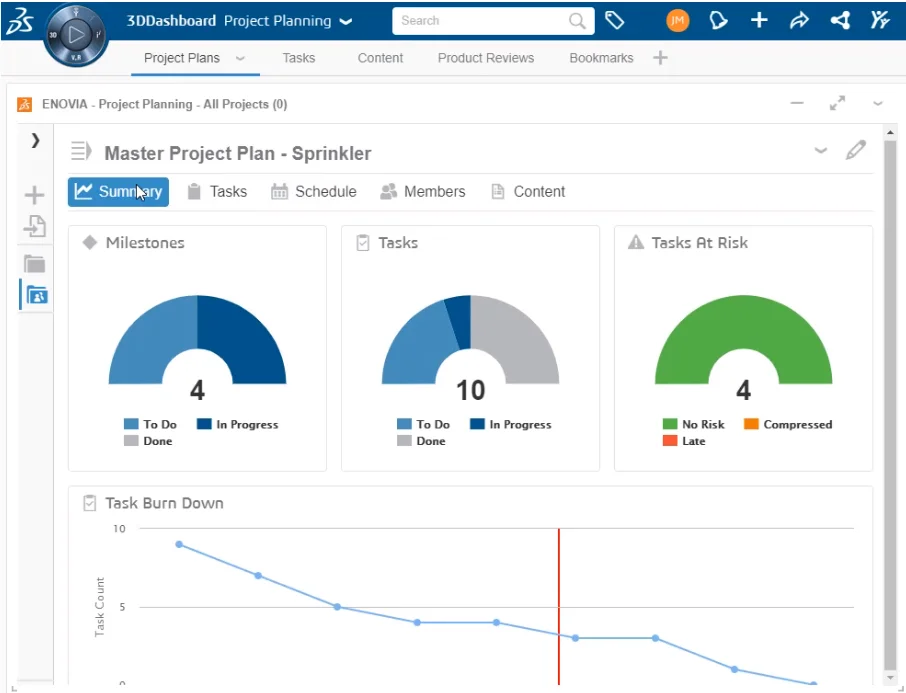
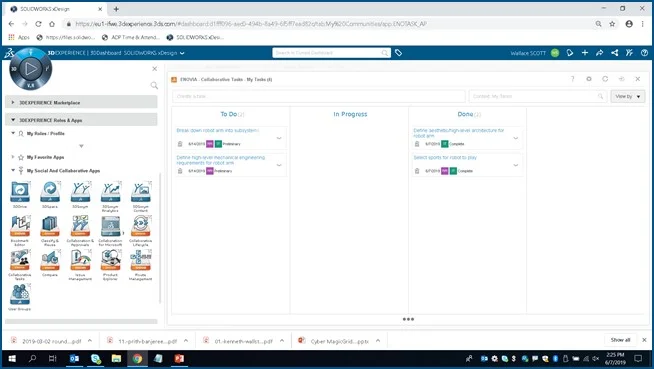
Once we completed our tasks, we moved them to the Done column simply by dragging and dropping the task card in the web-browser, which helped keep us on track with what was being done and what needed to be done. The Project Planner live dashboard view is great to see the current status of the project at any point in time.
We then uploaded our documents into a collaborative space that all of us could access, which allowed us to share any additional components. I also uploaded my hand sketches to the 3DSWYM community, where people could leave comments and pick which sketch was their favorite.
That was so much easier than trying to collate feedback via email!
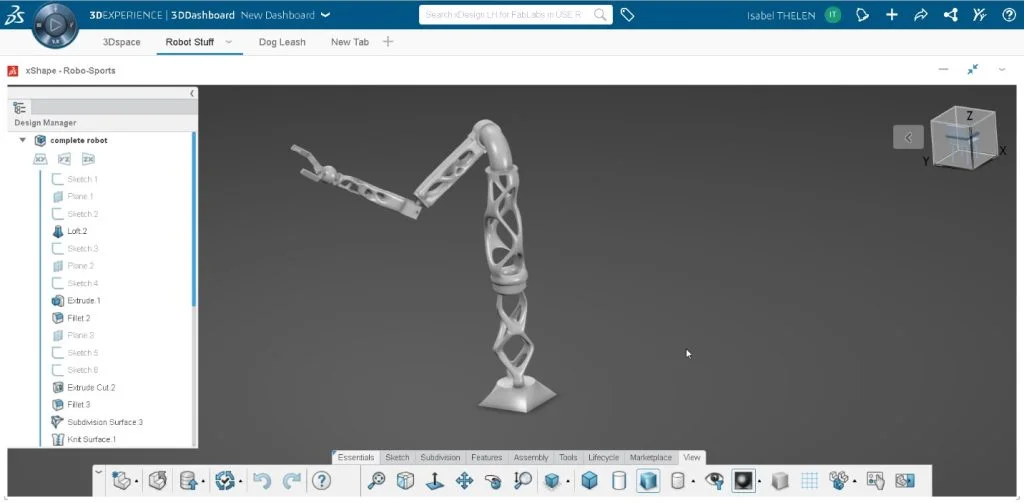
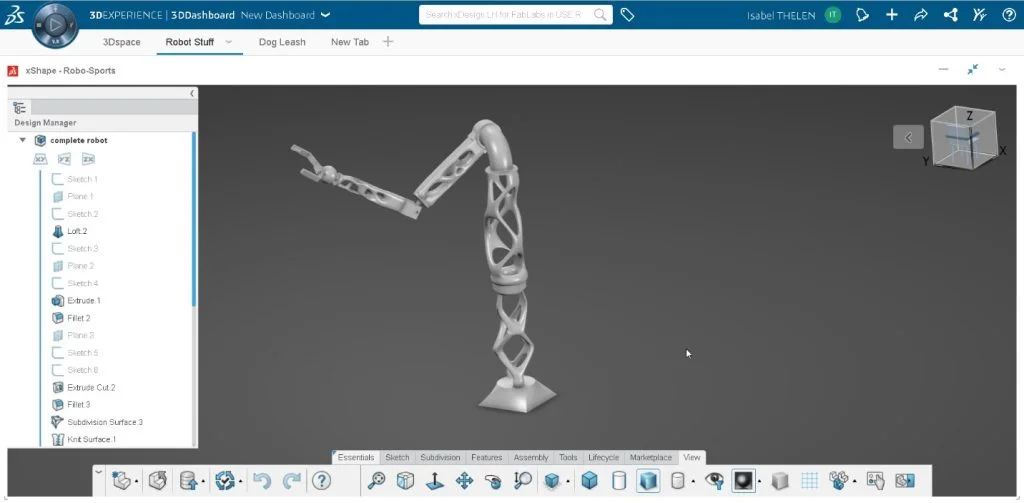
When the design was chosen, we got going on making the parts in 3D Creator and 3D Sculptor. Nathan started by using Design Guidance to see what kind of structure would work with the forces the robot arm would endure while playing different sports. He first created the joints that enabled the robot to move. Design Guidance then “grew” an optimal shape between them. Since he was working in the collaborative space, I was instantly able to access them.
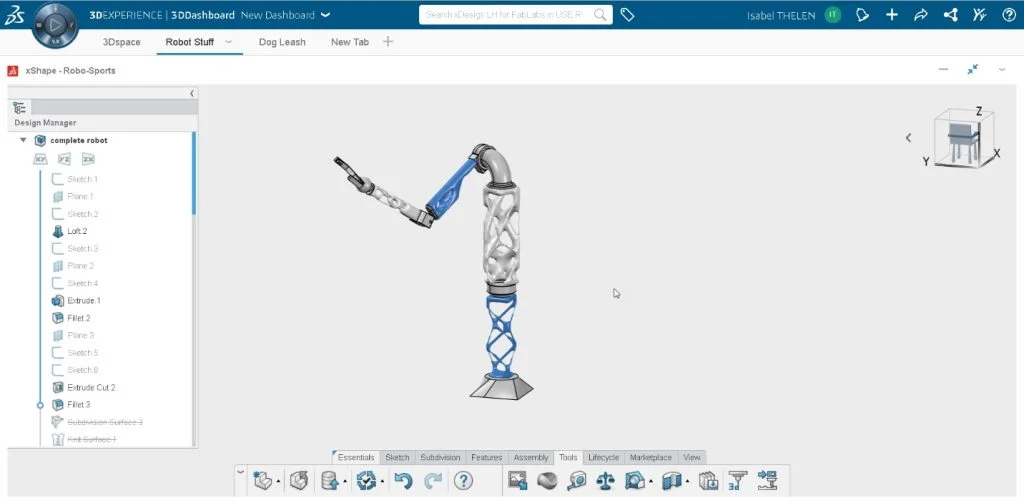
Using Nathan’s simulation-driven Design Guidance output as a guide, I used 3D Sculptor’s subdivision modeling to enclose the design and finalize the smooth aesthetic form. Nathan had given me a full assembly of the robot arm using the optimized design. The single modeling environment on the platform meant I didn’t need to worry about assembly structures or adding new part files or anything; I could just design and worry about that other stuff later. All I needed to do was make sure everything fit together and didn’t overlap. Interference detection in 3D Creator made this a breeze.
When I completed the subdivision modeling for the arm, I posted it to the community and requested feedback on the design so we could move on to 3D printing. I fixed what I needed to per Nathan and Wallace’s feedback, and we were all set.
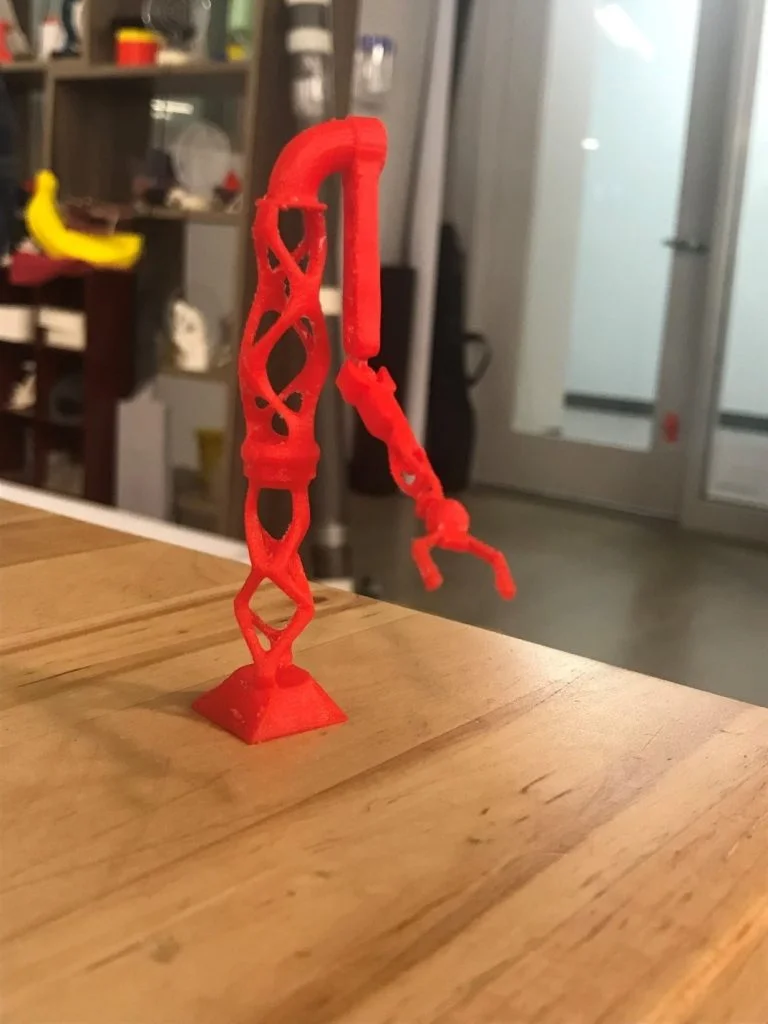
We decided to use an Ultimaker with dissolvable supports because our robot arm had a complex structure. This helped create a smoother looking arm. We shared the first print with the communities to show off our exploration into the collaboration of the platform.
This article is authored by student intern Isabel Thelen who worked in the 3DEXPERIENCE® lab under the guidance of Mark Rushton, Product Portfolio Manager at Dassault Systèmes SOLIDWORKS.