
Today’s blog is written by Agnieszka Galarowicz, Marketing Manager, SOLIDEXPERT, Poland, our SOLIDWORKS Value Added Reseller.
The European Rover Challenge 2025, which took place August 29-31, 2025, at the Stanisław Staszic University of Science and Technology in Krakow, Poland, is a prestigious competition in the Rover Challenge series. The competition involves replicating real missions that could be carried out on Mars by a planetary rover.
This was the 11th edition of one of Europe’s largest robotics competitions, with 25 teams competing for a place on the podium. The event also served as a meeting place for scientific and technological communities. Among the exhibitors was the AGH Space Systems club, where interested parties could find out more about the team and its designs. The European Rover Challenge also provided a space for children to take part in a wide range of space workshops. These included the ‘Rocket Workshops with AGH Space Systems’, led by members of the Rocket Section.

The First Day of the European Rover Challenge 2025
During the competition, the AGH Space Systems team faced eight challenges: Probing, Maintenance, Navigation, Droning, Science Exploration, Astro-Bio, Surface and Deep Sampling, and Presentation. The performance of the rovers on difficult sandy and rocky terrain was the aim behind the design of all these tasks.

The first task for the AGH Space Systems team was surface and deep sampling. The goal was to collect two types of sample: surface and deep. To complete this task, the team had to photograph the sampling sites, collect the samples, place them in a container on board the rover and weigh them.

The next challenge involved a drone and its operator detecting the designated location and landing there precisely. The team then faced the Science Exploration competition, in which the main task was to confirm a hypothesis put forward in an earlier report. They also had to find tools and other unusual items placed in the Mars Yard.
The last competition of the day was the Presentation Task. The main goal of this was to present the team and the process of creating Kalman. Finally, the team members had to answer questions from the judges.
The Second Day of the European Rover Challenge 2025
The following day began with the Maintenance Task, in which the rover had to interact with a platform designed for human use. This involved connecting it to the power supply, turning switches and operating fuses and an electromagnet. Next came the Navigation Task, in which Kalman had to reach four points. The difficulty lay in the fact that the rover was in fully autonomous mode and had to navigate using Aruco tags to reach the designated locations.
The day ended with the Astro-Bio competition, which consisted of identifying the source of samples and measuring their pH levels. Another important element was preparing a report based on biochemical data provided by the organizer.

The Third Day of the European Rover Challenge 2025
On the last day of the competition, the team faced the Probing Task. In order to score the maximum number of points, Kalman had to collect three scientific probes as quickly as possible, because in this competition, other teams were competing with us at the same time in the Mars Yard.

The three days of the European Rover Challenge are a time of great excitement and competition for each team. It is a very valuable period during which teams from around the world can exchange experiences and show together that students are capable of creating space structures!

Kalman Planetary Rover – Designed by AGH Space Systems
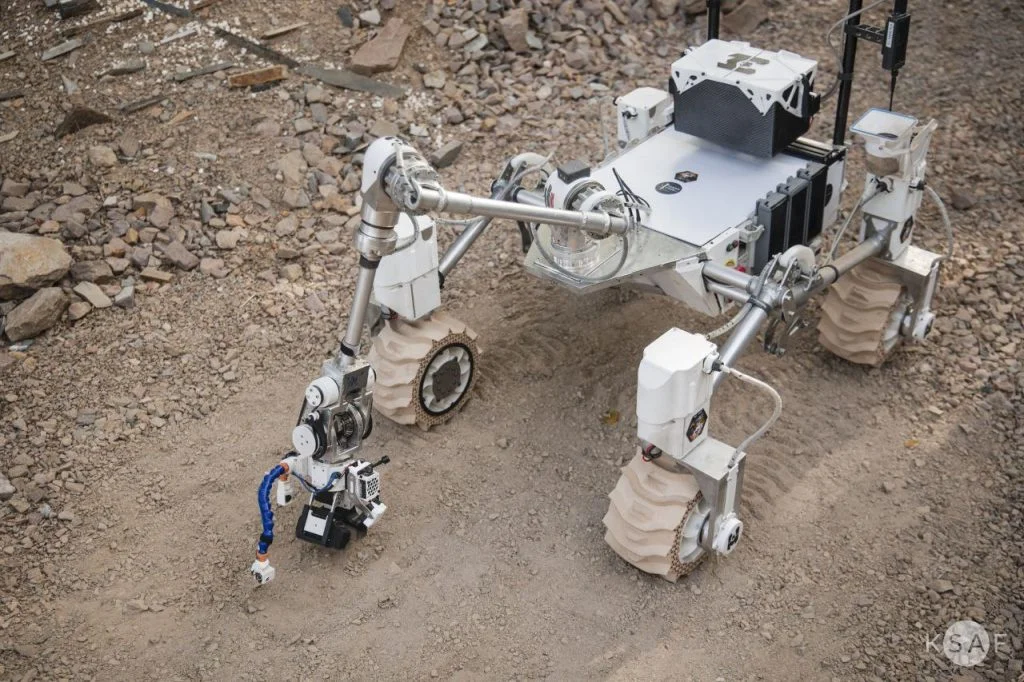
Kalman is the second planetary rover created by AGH Space Systems. It was designed from scratch using a modern modular approach. This means that each component, from electronics to mechanics to software, can be tested and developed independently, which significantly facilitates servicing and improvements. The design priorities simplicity and reliability while offering a wide range of technical capabilities.
It is equipped with a six-degree-of-freedom manipulator with interchangeable jaws that allow it to perform various tasks such as moving objects, operating control panels and carrying out basic maintenance. Kalman also has a mobile laboratory for soil sample analysis, as well as vision systems comprising depth cameras that support autonomous navigation, and analogue and digital cameras that support remote control. Thanks to its independently steerable wheels and lightweight construction using 3D-printed components, Kalman can maneuver and move easily over difficult terrain.
Kalman was designed using the 3DEXPERIENCE platform, which enables full integration of mechanical, electronic, and software design within a single environment. The version control and CAD data management system allows the team to track modifications of individual modules, perform rapid design iterations, and ensure seamless synchronization between mechanical engineers, electronics specialists, and software developers.
This project is being developed in preparation for the Rover Challenge series of competitions, providing young engineers with an opportunity to gain experience that they will be able to apply to future construction projects.
Congratulations Rover Challenge students from Stanisław Staszic University of Science and Technology, thank you for using SOLIDWORKS software to help you achieve your goals. Thank you also to Agnieszka Galarowicz, Marketing Manger, SOLIDEXPERT, part of Visiativ, Poland, for sharing with the SOLIDWORKS community.
Design well, Marie