
The world of simulating robots in play just got easier with the help of students TJ Watson and Michael Strickland from WPI.
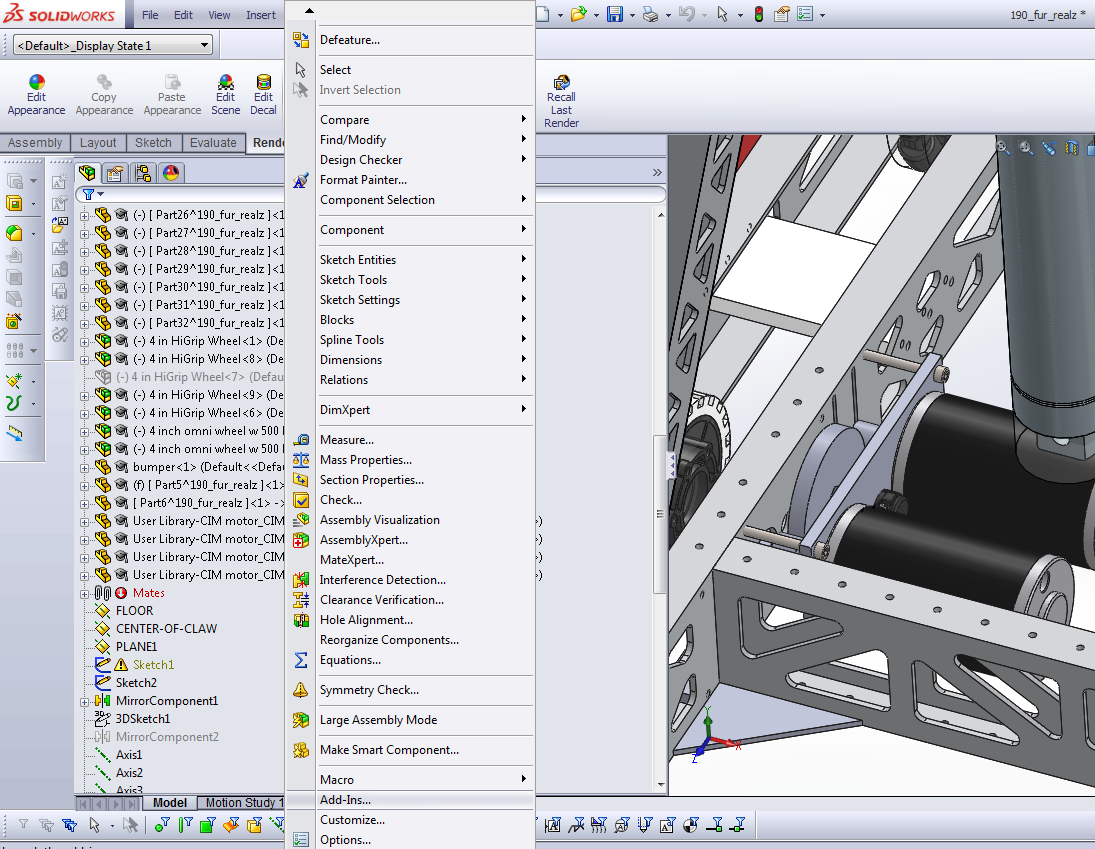
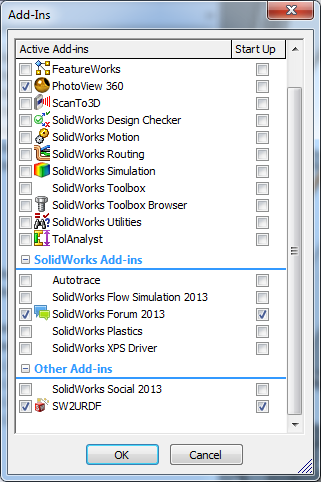
These students have worked to bring SolidWorks models into Gazebo in URDF file format. Using WPILIB Java, software libraries for controlling robots, they have developed the steps for you to do it too.
TJ and Michael have put together a document to help competitive teams get started with simple motion.
Document: WPI Robotics SolidWorks to Gazebo
Thank you TJ, Michael, Brad Miller, and WPI Robotics for sharing with the SolidWorks Community. Marie

Marie Planchard